В статье мы рассмотрим особенности компоновки электрической схемы приводных элементов мостовых кранов. На рынке представлено множество производителей, каждый из которых реализовал свои технологические разработки. Компонент обладает широкий перечень параметров, которые мы и проанализируем далее.
Принципиальные электрические схемы мостовых кранов
Электрический привод представляет собой полноценную систему электромеханического типа, основная задача которого – приведение в движение машин и оборудования, а также постоянное управление движением. Основная цель применения – бесперебойное осуществление технологического процесса.
Конструкция устройств регулярно модернизируется, благодаря чему можно смело утверждать, что агрегат – совокупность перечня электрических машин и управленческих систем. силовой агрегат потребляет около 60% от общего объема электроэнергии и выделяет большую долю механической энергии, среди всех компонентов системы.
Общая характеристика
Приводы, устанавливаемые в грузоподъемных машинах, работают в повторно-кратковременном режиме при высоких показателях частоты включения. Конструкция функциональная, что дает возможность работать в широком диапазоне регулировок скоростей. Надежность обеспечивает высокий уровень функциональности даже при значительных перегрузках в процессе разгона и торможения агрегатов.
Электропривод мостового
строительного
крана
– это устройство, которое реализуется в нескольких модификациях постоянного и переменного токов. Также категория включает такие вспомогательные приборы:
- контроллеры магнитного и силового типов;
- кнопочные посты;
- командные контроллеры;
- конечные выключатели;
- тормозные электромагниты;
- резисторы;
- тормозные электрические магниты.
Расчет конструкции и основных параметров мостового однобалочного крана г/п 5 т
serega161198
5 мая 2021
- 0
982
Курсовой проект. Содержит РПЗ и чертежи: кран мостовой однобалочный (чертеж общего вида), механизм передвижения (сборочный чертеж), крюковая подвеска (сборочный чертеж). Грузоподъемность 5 т., длина крана 10 м., высота подъема груза 7 м., скорость подъема груза 10 м/мин., скорость передвижения крана 20 м/мин. Классификация оборудования, устройство
Чертежи мостовых кранов
Разновидности планирования
Электрические схемы мостовых кранов обладают узкой специализацией, отвечая за конкретные узлы рабочего механизма. Сами схемы бывают трех типов:
- принципиальные;
- монтажные;
- маркированные;
- элементные.
Все они обладают принципиальными функциональными особенностями, которые учитываются при проектировании. Схема создается при условиях, приближенных к идеальным, с минимумом внешних воздействий.
Самые простые – принципиальные, используются при проведении ремонта и реализации настройки транспортно-подъемного агрегата. Схема дает возможность точно отображать полный перечень конструктивных элементов, разделяя систему по цепочкам, поддающихся простой и быстрой идентификации.
Варианты, сконструированные на основе чертежей механизмов, классифицируются на цепи осуществления управления и питания. Каждая из них обладает своими обозначениями, которые выражаются в тонких и толстых линиях. Установочная схема включает все указания взаимных расположений источников питания и вспомогательных компонентов.
Каждый отдельный компонент электрической схемы привода обладает особым обозначением. Барабанные версии, например, демонстрируются в форме разверток, контакты подвижного типа на чертежах рисуются прямоугольниками, пронумерованные линии указывают на положение.
В большинстве случаев схемы определяют последовательности подключения всех составных элементов:
- перемещения;
- подъема;
- защиты.
Но на схемах не указывается пропорциональность расположения.
Порядок ремонта кранов
Эксплуатация крана редко обходится без ремонтных работ, которые начинаются с подготовки участки цеха: устранение всех лишних деталей и вещей, препятствующих процессу восстановления крана. Во время ремонта агрегат должен быть отключен от сети. В цеховом журнале фиксируется дата ремонта и ответственный за его проведение. Рабочие снабжаются нарядом-допуском к ремонту, составляется специальная техническая документация.
Ремонт мостового крана
Сперва нужно отключить или изолировать секцию троллеев, поставив табличку: «Осторожно, под напряжением». Важно тщательно осмотреть крановые редукторы, очистить смотровой люк от грязи, если она засорила полость редуктора. После прочистки полости она заполняется смазочным веществом.
Во время ТО мостовых кранов проверяется система безопасности, и если есть отклонения, производится замена фрикционных потертых накладок и шарниров для системы рычагов на тормозах.
В целом ремонт включает такие стадии:
- термическая;
- слесарная;
- токарная;
- наплавочная;
- фрезерная;
- зубонарезная;
- шлифовальная.
Схема троллея мостового крана
Конструктивные особенности
Схема является достаточно технически сложным компонентом, состоящим из нескольких функциональных линий и участков. Рассмотрим их по отдельности, чтобы лучше ориентироваться в принципе действия электрического привода.
Контакты контакторов силового действия
Элементы применяются в ситуациях, когда кран осуществляет подъем или опускание груза. В этих случаях возникает необходимость изменения направления вращений двигателя. Реализуется данная задача посредством переключения фаз, которые подаются на обмотки статора электрического мотора. Функция обеспечивается контакторами силового типа, каждый из которых обладает по два контакта аналогичного действия. Детали являются основными, главное их назначение – обеспечивать прохождение больших токов.
Если говорить об агрегатах постоянного тока, то их катушки разработаны для использования в сетях с неизменными параметрами напряжения. Сами же контакты подходят для передачи как постоянного, так и переменного токов.
Но, тем не менее, в большинстве современных конструкций используются именно контакты типа DC, как более надежные, чем компоненты типа АС. А также постоянные контакты обладают еще одним преимуществом – для них является возможность подключения катушек независимо от их полярности.
Многие задаются вопросом – как на кран подводится постоянный ток? Ответ простой – он вырабатывается посредством выпрямления переменных токов при помощи диодов. Мощный трансформатор снижает имеющиеся значения до показателей, которые подходят для катушек контакторов и реле DC. Диоды являются обязательным компонентами конструкции.
Релейные приспособления максимальных токов обеспечивают защиту цепи от короткого замыкания и перегрузок. В случае возникновения аварийных ситуаций реле отключает контактор, контакты которого осуществляют подачу напряжения на диоды. Стоит обращать внимание, что контактор относится к устройствам, работающим от переменного тока. Этот показатель стабильный, ведь при включении компонента постоянное напряжение еще не успевает сгенерироваться.
Также краны включают несколько конденсаторов (в зависимости от конкретного типа модели). Они выполняют немаловажную функцию – уменьшают колебания результативного напряжения, ведь после диодов ток выходит не на 100% постоянным, а пульсирующим.
Маломощные компоненты в силовых цепях используют контакторы АС. Конструкция в целом – одна из самых оптимальных, но не лишена недостатков. Один из них – возможное наличие вибраций.
Реализация сопротивления
Оператор при работе с краном осуществляет не только переключение направлений оборотов двигателя. Скорость вращения также поддается регулярным изменениям. Воплощается это достаточно просто – с помощью двигателя подъема. Агрегат асинхронный, включает фазный ротор. Это указывает на некоторые отличия, среди которых – навивание напряжения в статоре. Обусловливается данная особенность наличием в роторе (движущемся компоненте) обмотки. Это ключевое отличие от традиционных асинхронных моторов.
Самих роторных обмоток три, как и в статоре. Концы обмоток подключаются между собой в форме звезды, а начала соединяются с кольцами, на которых перемещаются щетки. От последних элементов ответвляются кабели, ведущие к сопротивлениям. Они же, в свою очередь, являются спиралевидными компонентами (в отдельных случаях – деталями из сильно изогнутой проволоки), изготовленными из сплавов, обладающих высокими сопротивлениями. Располагаются они в ящиках специальной конструкции. Контейнеры в свою очередь соединяются в блоки. Они также размещаются в шкафах, а сопротивления подключаются друг к другу в форме звездочки.
Блоки контейнеров
Скорость оборотов мотора изменяется посредством закорачивания частей сопротивления контакторами, которые называются элементами ускорения. Показатели сопротивления в цепях обмоток ротора минимальные, уровни тока – максимальные. С правой стороны контакторы не включаются, сопротивления здесь на максимальном уровне, а скорость наоборот – минимальная.
Крановые электродвигатели работают в тяжелых условиях, поэтому для увеличения прочности и улучшения теплоотдачи они имеют стальной литой корпус с ребристой поверхностью. Двигатели снабжены водозащитной изоляцией, которая обеспечивает их нормальную эксплуатацию на открытом воздухе. Статор электродвигателя изготовляют из тонких (0,5 мм) листов электротехнической стали. В пазах статора размещены обмотки с выведенными на зажимы концами. Фазный ротор, как и статор, изготовляют из электротехнической стали. Пластины укреплены на сердечнике, напрессованном на валу.
В двигателях применяют электроизоляционные материалы с различными характеристиками по нагреву, урановые двигатели серий MTF и MTKF имеют изоля-обш Класса выдерживающую нагрев до 155 °С. Для непромышленных двигателей, работающих в более легких условиях, используют изоляцию класса А (До 105 °С). Ранее выпускавшиеся крановые двигатели серий МТ, МТБ, МТКВ имели изоляцию класса В, выдерживающую нагрев до 130 °С.
Заводы изготовляют электродвигатели с одним или двумя выступающими концами вала. Концы валов двигателей 0-3-го габаритов — цилиндрические, 4-7-го габаритов — конические.
Первая цифра в марке кранового электродвигателя обозначает условный габарит двигателя, принятый по диаметру пакета статора, вторая цифра -условную длину статора, третья — число полюсов. Обмотка статоров электродвигателей катушечная, однослойная или двухслойная, намотанная из круглого провода, обмотка ротора (для фазных роторов) однослойная, катушечная. Статоры и роторы пропитывают изоляционными лаками или компаундами. Для статоров и роторов изготовляемых в настоящее время электродвигателей серии MTF и статоров короткозамкнутых электродвигателей серии MTKF применены обмоточные провода ПЭТ-155 класса нагревостойкости F. Эти двигатели имеют повышенную перегрузочную способность при сравнительно небольших токах и .малом времени разгона. Начала обмоток ротора выведены к трем контактным кольцам на валу ротора. Токосъемный механизм ротора выполнен с постоянно прилегающими щетками, что позволяет реверсировать двигатель.
Короткозамкнутые двигатели имеют литой ротор из алюминиевого сплава повышенного удельного сопротивления. На короткозамкнутых кольцах расположены вентиляционные лопатки, которые отлиты заодно с ротором. Эти лопатки создают циркуляцию воздуха с торцевых сторон двигателя, что способствует лучшему охлаждению обмоток статора. В основном же электродвигатели серий MTF и MTKF охлаждаются вентилятором с радиальным расположением лопаток, что создает струю воздуха вдоль наружной поверхности станины. Вентилятор посажен на вал ротора со стороны, противоположной токосъемному устройству.
На кранах иногда применяют также асинхронные двигатели единой серии АОФ, АОС, AOIIT с повышенной продолжительностью включения. Электродвигатели серии А изготовляют семи габаритов, причем каждый из них может иметь обычную в двигателях общего назначе ния или специальную механическую характеристику с повышенным пусковым моментом, повышенным сколь жением или фазный ротор. Двигатели серии А изготовляют в алюминиевом или чугунном корпусе, который имеет защиту от попадания внутрь посторонних предметов и воды, а в закрытых двигателях — и пыли.
В соответствии с исполнением установлено следую, щее обозначение двигателей: А — защищенный в чугунном корпусе; АО — закрытый, обдуваемый, в чугунном корпусе; АЛ — закрытый, обдуваемый, в алюминиевом корпусе. Кроме буквенных имеются также цифровые индексы: первая цифра указывает условный номер диаметра статора, вторая — длину статора, третья — число полюсов. Например, АОЛ-31-6 обозначает электродвигатель общего назначения в закрытом обдуваемом алюминиевом корпусе, третьего диаметра, первой длины, шестиполюсный. Специальные двигатели единой серии обозначаются следующим образом: АОЭ — со встроенным электромагнитным тормозом; АОП — с повышенным пусковым моментом; АОС -с повышенным скольжением
В настоящее время наша промышленность начинает выпускать новые электродвигатели четвертой серии с улучшенными технико-экономическими показателями. Изменяется также их маркировка: вводятся данные о высоте оси вращения, установочные и габаритные размеры статора согласно международной системе классификации.
Пуск и регулирование частоты вращения асинхронных двигателей. Электродвижущая сила, наводимая в роторе асинхронного двигателя, обратно пропорциональна его частоте вращения. При неподвижном роторе она имеет значительную величину, поэтому в начальный момент пуска под действием этой э. д. с. в роторе проходят токи, в 5-8 раз превышающие номинальное значение. Чтобы избежать перегрузок в сети, в цепь фазного ротора вводят пускорегулирующие резисторы, которые ограничивают ток ротора, а следовательно, и пусковой ток статора. При включении в цепь ротора дополнительных резисторов получают более пологие (мягкие) характеристики, которые называются искусственными.
Если ввести в обмотку ротора дополнительные резисторы, то двигатель будет развивать необходимый момент при повышенном скольжении, а следовательно, при меньшей частоте вращения. Введение резисторов сопротивлением, превышающим, например, в 5 раз сопротивление обмоток ротора, при неизменной «агрузке примерно во столько же раз увеличит скольжение, которое соста-вит s=0,055 5=0,275.
Тогда частота вращения ротора будет равна: я= 1000(1-0,275) -725 об/мин.
В большинстве случаев короткозамкнутые двигатели небольшой мощности пускают в ход без дополнительных устройств, так как их характеристики мягче, чем у двигателей с фазным ротором.
Особенности управления двигателем механизма подъема. При опускании груза его масса способствует вращению, поэтому частота вращения двигателя весьма быстро достигает синхронной и может даже превзойти ее. Это значит, что скольжение двигателя, уменьшившись до нуля, может стать отрицательным, т.е. ротор не только не будет отставать от вращающегося поля, но и начнет обгонять его.
Поэтому при спуске тяжелых грузов увеличение сопротивления в роторе увеличивает частоту вращения двигателя.
Пускорегулирующие резисторы. Для регулирования частоты вращения двигателя, уменьшения пускового тока до значения, безопасного для двигателя и сети, и увеличения вращающего пускового момента применяют ящики резисторов (рис. 1). В каждом ящике установленно несколько одинаковых элементов. Каждый элемент состоит из стальной пластинки с надетыми на нее сверху и снизу фарфоровыми гребенками. В пазы гребенок заложена наматываемая на элемент константановая проволока или фехралевая лента, которая может выдерживать долговременный нагрев до 300-400 °С. Элементы соединены последовательно, для чего при сборке между ними прокладывают поочередно фарфоровые изоляторы и дистанционные трубки. Брызгозащищенный ящик закрыт цельными боковинами и крышкой. Передний и задний щиты имеют отверстия типа жалюзи. Внешние зажимы расположены на панели в нижней части ящика.
Рис. 1. Ящики пусковых резисторов, а -типа НК-1; б -типа НФ I.
Ящики резисторов предназначены только для определенного электродвигателя или группы их, управляемой конкретным типом контроллера. Поэтому внешние зажимы ящиков резисторов маркируются аналогично зажимам контроллера. На кране ящик должен быть установлен строго горизонтально. Для отвода тепла между отдельными ящиками в комплекте необходимо иметь зазор не менее 120 мм. Кожухи ящиков должны быть надежно заземлены. Согласно действующим правилам устанавливать ящики резисторов в кабине крана запрещается, поэтому если в старых конструкциях кранов такая установка была произведена ранее, то ящики надо перенести из кабины. Это требование необходимо выполнить в двух случаях: если они мешают нормальной работе крановщика или если кран работает в горячем цехе.
При отсутствии пусковых резисторов требуемого типа их можно подобрать из нормализованного ряда.
Силовые контроллеры. Для включения и регулирования пусковых характеристик электродвигателей на мостовых кранах применяются контроллеры. Известны два типа контроллеров: барабанные и кулачковые.
В последние годы для управления электроприводом преимущественно применяют кулачковые контроллеры. Эти контроллеры имеют один или два ряда кулачковых элементов, состоящих из подвижных и неподвижных контактов с укрепленными на их концах медными губками. Подвижный контакт контроллера вращается на оси и постоянно прижат своим хвостовиком с роликом к кулачковой шайбе. Фасонные кулачковые шайбы К (рис. 23) укреплены на валу, спрессованном электроизоляционным материалом. По шайбам перекатываются ролики Р, изменяющие свое положение в зависимости от того, находится ролик на участке с меньшим или большим радиусом. В первом случае медные контактные элементы контроллера замкнуты и прижимаются пружиной П, во втором, наоборот, контакты разомкнуты. Замыкание и размыкание контактов сопровождается их перекатыванием, что позволяет им очищаться от окиси меди и нагара. Износ контактных поверхностей в кулачковых контроллерах меньше, чем в барабанных, из-за отсутствия трения скольжения и вследствие того, что рабочая часть контакта, через которую более или менее длительно проходит ток, удалена от места образования искр и дуги. Эти особенности кулачковых контроллеров дают возможность использовать их при тяжелых режимах работы. Для облегчения работы контактных деталей в контроллерах применяют электромагнитное гашение дуги. Специальная катушка, выполненная из нескольких витков толстой проволоки, укреплена на стальном сердечнике. По дугогасительной катушке проходит ток., разрываемый контроллером (ток силовой цепи). Дуга и дугогасительная катушка создают магнитные поля, направленные навстречу друг другу, что схематично показано на рис. 2.
Рис. 2. Схема работы контактов кулачкового контроллера.
На кранах применяют в основном контроллеры ККТ-61А и ККТ-62А двухрядного горизонтального исполнения. В отличие от ранее применяемых однорядных вертикальных контроллеров НТ-61 и НТ-51 масса и габариты этих аппаратов при одинаковых характеристиках по току и мощности в 1,5 раза меньше. Контроллеры рассчитаны на большое число включений (600-1000 в час).
Принципиальная электрическая схема кулачкового контроллера показана на рис. 3. На этой схеме изображена развертка кулачковой шайбы, указывающая, на какой из позиций ее вращения контакты замыкаются.
Шайбы контроллера в нулевом положении не касаются рычагов подвижных губок и, следовательно, силовые цепи разомкнуты. Если перевести рукоятку контроллера в первое положение направления Вперед, то обмотки статора электродвигателя окажутся под напряжением. Включенный в цепь ротора полный комплект резисторов обеспечивает пуск двигателя по мягкой характеристике на пониженную частоту вращения.
Рис. 3. Электрическая схема управления двигателем с помощью силового контроллера. 1 — двигатель; 2 — пускорегулирующие резисторы; 3 — контроллер.
Во второй позиции штурвала контроллера замыкаются контакты Р5, выводя из работы часть сопротивления. В третьем, а затем и в четвертом положении замыкаются последовательно контакты Р4 и РЗ, выводя из работы вторую и третью части сопротивления. В пятом положении все контакты в цепи ротора замкнуты, его обмотки оказываются соединенными накоротко, поэтому электродвигатель развивает наибольшую частоту вращения.
Магнитные контроллеры. Для приводов, работающих тушки которых питаются ПОСТОЯННЫМ током от выпрямителей ВС.
В первом положении командоконтроллера при подъеме срабатывают контакторы В, КП и Т, реле 1РУ, 2РУ, а затем контактор П. В результате двигатель подключается к сети, растормаживается, в цепи его ротора шунтируется часть резисторов и происходит разгон двигателя с предварительной выборкой слабины каната. Во втором и третьем положении рукоятки срабатывают соответственно контакторы 1У и 2У, что дает возможность получить промежуточные скорости. При включении контактора 2У отключается катушка 1РУ, в результате чего с выдержкой времени замыкается контакт 1РУ в цепи катушек ЗУ и 4У. В четвертом положении рукоятки срабатывает контактор ЗУ, при этом отключается катушка 2РУ, после чего с выдержкой времени включается контактор 4У. Двигатель переходит сначала на промежуточную, а после разгона на рабочую характеристику подъема.
При быстром переключении рукоятки из нулевого в четвертое положение двигатель переходит на рабочую характеристику с автоматической выдержкой времени с помощью реле 1РУ и 2РУ.
При быстром переводе рукоятки командоконтроллера из нулевого в четвертое положение при спуске двигатель также достигает рабочей характеристики с автоматической выдержкой времени с помощью реле 1РУ и 2РУ. При спуске грузов с малой массой, когда потери трения в механизме больше момента двигателя, последний будет работать вхолостую, а более тяжелые грузы будут опускаться со сверхсинхронной частотой вращения. Для уменьшения скорости опускания переводят рукоятку командоконтроллера в третье положение, в результате чего срабатывает контактор однофазного торможения. В этом случае двигатель работает в режиме электромагнитного тормоза. Дальнейшее снижение скорости получают во втором и первом положениях рукоятки, когда двигатель, подключенный к сети контактором В, работает в режиме противовключения.
Магнитный контроллер типа ТА выполнен по симметричной схеме. Здесь предусмотрена возможность свободного выбега двигателя в нулевом положении контроллера, в то время как механическое торможение осуществляется в любом из остальных положений рукоятки командоконтроллера, при срабатывании конечных выключателей или при нажатии кнопки АК. Реле РН и контактор Т в нулевом положении не отключаются. В данной схеме режим противовключения обеспечивает торможение движущегося крана или грузовой тележки. При вращении двигателя, например, в направлении Вперед переключают командоконтроллер в одно из положений Назад. Первым срабатывает контактор Н, в результате чего в цепях статора и ротора, включая и пускорегулирующие сопротивления, вновь появляется ток.
Рис. 5. Магнитный контроллер типа ТА. а — электрическая схема силовой части; б — схема цепей управления.
Так как направление вращения магнитного пели противоположно направлению вращения двигателя, напряжение, генерируемое в роторе, возрастает, вследствие чего срабатывает реле РН, подключенное к пускорегулирующему сопротивлению, и прерывает цепь катушек П, 1У, 2У, ЗУ. Двигатель будет работать в режиме противо-включения с полным сопротивлением в цепи ротора независимо от положения командоконтроллера. По мере снижения частоты вращения напряжение на зажимах катушки реле РП снижается, и при /г» О реле отключается. Для предотвращения самопроизвольного движения крана в противоположном направлении командоконтроллер необходимо переключить в нулевое положение.
Командоаппараты. Для приведения в действие магнитных контроллеров, контакторов, защитных и реверсивных панелей применяют аппараты, носящие общее наименование командоаппаратов. В число командоаппаратов входят командоконтроллеры, универсальные переключатели, конечные и аварийные выключатели.
Корпуса и крышки командоаппаратов обычно отлиты из чугуна или алюминиевого сплава. Наружу выведены рычаги или рукоятки, которые имеют фиксирующее устройство. Формы и размеры рычагов у рукояток зависят от типа и места установки аппарата. Например, командоконтроллеры КП-1400 и КП-1500 встраивают в кресло крановщика, поэтому у них удлиненная рукоятка с кулисным приводом; у конечных выключателей рычаги с самовозвратом или без самовозврата. На рис. 27 показан командоконтроллер. Контактная система командоконтроллера отличается от контактной системы силового контроллера тем, что выполнена в виде контактного мостика, размещенного на рычаге кулачкового элемента. На контактной поверхности мостика напаяны серебряные пластинки, стойкие к окислению и создающие надежный контакт даже при небольшом давлении пружины кулачкового элемента. Кулачковый элемент поворачивается под действием кулачковой шайбы, насаженной на вал с фиксирующим устройством. Так же как и силовые контроллеры, командоконтроллеры на электросхемах изображают в развернутом виде, где указывается, в каком фиксированном положении рукоятки кулачкового вала контактный мостик замыкает цепь.
Если командоконтроллеры имеют несколько контактных мостиков, то конечный выключатель обычно имеет один или два таких мостика. На кранах широко применяют конечный выключатель типа КУ, который обеспечивает различные схемы замыкания контакторов. Выключатель типа КУ имеет два контакта, которые могут быть размыкающими, замыкающими или один замыкающий, а другой — размыкающий. Механизм рычажного выключателя типа КУ размещен в штампованном стальном закрытом со всех сторон корпусе и имеет снаружи один рычаг, на который и воздействуют упоры, установленные в крайних положениях на пути следования перемещающегося механизма. На валу выключателя закреплены шайбы. При повороте вала изоляционный (из карболита) рычаг с контактными мостиками 6 замыкает (или размыкает) неподвижные контакты, установленные на изоляционной подставке. Рычаг под действием пружины с помощью ролика постоянно прижат к кулачковым шайбам. При этом контакты разомкнуты. Для того чтобы в исходном положении контакты были замкнуты, ролик рычага переставляют на ось, а пружину — в положение К. Изменение положения кулачковых шайб относительно оси производится их поворотом и фиксированием винтами. Необходимость изменения положения шайб возникает при перестановках приводного рычага, насаживаемого на конец вала, и при изменении схемы замыкания контактов. Фиксирующий храповичок и соединенная с ним собачка 8 с пружиной предназначены для возврата приводного рычага выключателя в исходное положение. Кроме рассмотренного выключателя на кранах применяется 52 шпиндельный выключатель типа ВУ-250А. Такие выключатели устанавливают для ограничения высоты подъема груза. В этом случае контакты замыкаются и размыкаются поворотом тихоходного вала червячного редуктора, имеющего передаточное отношение 1:50. При набегании замыкающего ролика на выступ контактного рычага последний медленно поворачивается, а затем запирается в замкнутом положении собачкой. Весь путь замыкания подвижного контакта соответствует 5/6 оборота вала с шайбами или 42 оборотам приводного вала. Выключатель возвращается в исходное положение после срабатываний при повороте приводного валика на 1,5 оборота.
Рис. 6. Командоконтроллер. 1 — корпус; 2 — вал кулачкового барабана; 3 — сектор зубчатый; 4 — рукоятка; 5 — кулачки, изменяющие число фиксирующих положений рукоятки; 6 — рычаг фиксирующего устройства; 7 — пружина фиксирующего устройства; 8 — шайба фиксатора; 9 — кулачковые элементы; 10 — кулачковые шайбы; 11 — рейка для крепления кулачковых элементов.
Рис. 7. Конечный выключатель типа КУ. а — принцип действия; б — общий вид со снятой крышкой.
Выключатель ВУ-250А имеет два мостика и может быть настроен на разрыв цепей в двух положениях, что позволяет ограничивать как верхнее, так и нижнее положение крюковой подвески. Выключатели ВУ-150А аналогичны по конструкции выключателю ВУ-250А, но могут разрывать только одну цепь. Допустимый длительный и разрываемый ток у них равен 20 А. Выключатели КУ-701 имеют одну цепь, их допустимый ток 10 А.
Универсальные переключатели набраны из отдельных контактных секций, изолированных одна от другой пластмассовыми стенками. Наиболее часто применяется универсальный переключатель УП-5311. Первые две цифры обозначают, что аппарат выполнен в открытом нерегулируемом исполнении, следующие две цифры — число секций (в данном случае 11).
Аварийные ручные выключатели ВУ-220 служат для мгновенного разрыва основных цепей управления при необходимости экстренной остановки всего крана; их выполняют с нормально замкнутыми контактами.
Защитные и реверсивные панели. Защитные панели предназначены для максимальной и нулевой защиты двигателей и применяются совместно с кулачковыми и магнитными контроллерами. Панель расположена в металлическом шкафу, в котором на изоляционной асбоцементной плите вмонтированы трехполюсный рубильник с наружной рукояткой и линейный контактор. Панель также снабжена максимальными реле, действующими на линейный контактор, предохранителями цепей управления, переключателем опробования, пусковой кнопкой к электромеханическим замком.
Электромеханический замок, собранный из серийно выпускаемых изделий для дверного замка и пакетного выключателя, изображен ча рис. 29. От дверного замка взят механизм. Из текстолита изготовлены корпус, муфта, крышка и металлическая упорная пластина, которая служит для ограничения поворота контактной шайбы на 90°. Через фигурное отверстие упорной металлической пластины проходит поводковая планка.
Рис. 8. Электромеханический замок.
Детали электрической части замка взяты от стандартного пакетного выключателя на ток 25 А.
Замок устанавливается в стенке шкафа защитной панели таким образом, что наружу выступает лишь торец механизма. Остальная часть замка помещается внутри панели, запираемой на замок. С помощью двух зажимов замок включается последовательно в цепь катушки главного контактора. Нормальное положение контактов замка разомкнутое. Чтобы включить контактор, необходимо вставить ключ в скважину механизма и, повернув его по часовой стрелке на 90°, замкнуть контакты.
Допускается вместо контактного замка устанавливать замок с индивидуальным ключом, запирающий рубильник, автомат или выключатель в отключенном положении. Ключ из замка должен выниматься только при отключенном и запертом в этом положении рубильнике, автомате или выключателе. Этому требованию отвечают защитные панели типа ПЗКБ-160 «ПЗКБ-400.
Рис. 9. Принцип действия контактора, а — переменного тока; б — постоянного тока.
Контакторы. Основным аппаратом крановых защитных и реверсивных панелей и магнитных контроллеров является контактор — прибор для включения и отключения электрического тока на расстоянии. На рис. 30 показан внешний вид контактора и виден принцип его действия. На изолированной оси 1 квадратного сечения, подшипники которой для простоты не показаны, установлены подвижные рабочие контакты, якорь электромагнита и траверса для блок-контактов.
На рис. 9, а показана упрощенная схема пуска и остановки короткозамкнутого асинхронного двигателя с кнопочным управлением при помощи контактора. Силовая цепь подключена непосредственно к двигателю и обозначена толстыми линиями. В цепи управления (тонкие линии) показаны две кнопки — включающая Пуск и отключающая Стоп. Пуск производится следующим образом. При замыкании кнопки Пуск ток проходит от провода IIX через обмотку электромагнита к проводу Л3. Образуется замкнутая цепь. Якорь притягивается и поворачивает ось, при этом одновременно замыкаются рабочие контакты и верхние блок-контакты. Последние шунтируют кнопку Пуск и позволяют отключить включающую кнопку. Для выключения двигателя достаточно разомкнуть цепь управления, нажав на кнопку Стоп. Контакты отпадут под действием собственной массы устройства.
Устройство контактора постоянного тока показано на рис. 9. При прохождении тока через обмотку катушки якорь (подвижная часть магнитопровода) притягивается к неподвижному сердечнику. При этом якорь, поворачиваясь вместе с укрепленным на нем супортом и подвижным контактом вокруг оси, вводит подвижный контакт в соприкосновении с неподвижным контактом. При этом контакты, соединяясь сначала своими верхними частями, приходят в дальнейшее соприкосновение и смещаются относительно друг друга, как бы притираясь. Гашение дуги происходит в искрогасительной камере. Последовательно с главными контактами включена дугогасительная катушка. Создаваемое этой катушкой магнитное поле направлено таким образом, что дуга (как проводник с током) выталкивается вверх по правилу правой руки. Ток от подвижного контакта отводится при помощи гибкого проводника. Контактор монтируется на плите.
С 1971 г. промышленность выпускает контакторы переменного тока серии КТ-6000. Допускаемая частота включения этих контакторов не менее 600 в час. Гашение дуги-электромагнитное, что позволяет осуществлять включение, реверсирование и отключение заторможенных двигателей, в том числе с короткозамкнутым ротором.
Блокировочные контакты контактора состоят из прессованного корпуса, неподвижных контактов и траверсы с подвижными контактами мостикового типа. Траверса перемещается в металлических направляющих под действием кулачка, укрепленного на валу контактора.
Реле. Для защиты электропривода от перегрузок и падения напряжения применяют промежуточные и тепловые реле, реле тока и напряжения, реле времени.
Промежуточные реле применяются в электрических цепях в тех случаях, когда количество блок-контактов основных аппаратов недостаточно для реализации электрической схемы управления краном. Изготовляют их с передним и задним присоединением проводов.
Для защиты от перегрева обмоток электродвигателей, Работающих в длительном режиме, применяют тепловые Реле типов ТРИ, ТРП. ТРТ. В ряде случаев такие реле входят в комплект электрических аппаратов, например магнитных пускателей.
Биметаллический элемент представляет собой двухслойную металлическую пластинку из двух металлов, имеющих различные коэффициенты линейного расширения. Проволочная спираль электронагревателя включается последовательно в электрическую цепь, х. е. в цепь защиты двигателя. Замыкание или размыкание этой цепи осуществляют контакты специального электромагнитного выключателя (на схеме не указан) В цепь катушки этого выключателя включен размыкающий контакт теплового реле. При длительной перегруз, ке двигателя, когда ток в нагревателе заметно возрастает, биметаллический элемент изгибается и освобождает защелку, которая под действием пружины поворачивается и размыкает контакты. Цепь катушки электромагнитного выключателя разрывается, его контакты размыкаются и двигатель отключается от сети После охлаждения элемента нажатием кнопки возвращают реле в исходное положение. Эти реле изготовляют с самовозвратом или ручным возвратом в исходное положение.
Рис. 10. Реле максимального тока.
В качестве максимальной токовой защиты в силовых цепях мостовых кранов применяют реле мгновенного действия РЭО-401 и РЭ-571Т.
Гибкие кабели
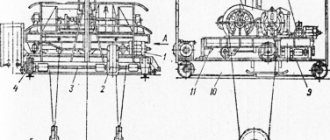
Моторы подъемных кранов располагаются на платформе поворотной конструкции, которая располагается на тележке, перемещаемой по мостовых балках кранов. Другие составные части устанавливаются на мостовых балках. Мотор соединяется с вышеописанными компонентами именно гибкими кабелями, которые располагаются на весу на тросе. При перемещениях телеги по мосту кабельные соединители двигаются следом. Сгибаясь в процессе работы жилы проводов могут ломаться, что в результате приводит к неисправностям.
Реализованы также модификации, вдоль мостов которых движутся дополнительные троллеи. При движении телеги токосъемные элементы, присоединенные к телеге ездят вместе с основным компонентом. Благодаря этому, напряжение подается напрямую на телегу с моста.
Гибкие кабели на готовой конструкции
Контактор типа РН и контроллер
Итак, контроллер представляет собой точный агрегат, осуществляющий непосредственное управление краном. Отдельно на конструкции обозначается номер шайбы контроллерного элемента. Есть на корпусе и другие цифры, а также прерывистые линии, указывающие на актуальное положение контроллерного рычага. Черная точка, к примеру, идентифицирует замыкание контакта в выбранном положении. Если же точки нет, тогда контакт, соответственно разомкнут.
Второй обязательный элемент – контактор РН, функционал которого позволяет называть его реле. Возможности компонента по-настоящему широкие, в частности в них включен функционал пускателя. Деталь оборудована катушкой, через которую проходит ток и вследствие чего контакты замыкаются или размыкаются.
На схеме видно, что при «нулевом» положении контактора, соединительные элементы замыкаются и начинается подача напряжения на катушку РН контактора. В случае срабатывания контактора, агрегат задействует контакт для самостоятельного «подхвата». Этот компонент отличается тем, что может бесперебойно работать и в других положениях реле.
Отключает контроллер также довольно просто – выключением устройств 1 и 2 РУ. При запуске реле с максимальным током МР при перегрузках электромотора. Контакторы на 1В запускаются при подъеме крановой конструкции. Даже если при срабатывании РН устройство не выключается в ситуациях, когда цепочка шунтирования не размыкается. Включает цепочка также контакты из конечного выключателя типа ВКГ2, срабатывающий при поднятии веса на слишком большую высоту. Элемент реле К3 также присутствует, и он всегда находится в замкнутом положении при нормальном функционировании крана.
Отметим, что вышеупомянутое реле относится больше к защитным системам, применяемым в связи с технологическими особенностями кранов с траверсами. С их помощью груз можно поднимать вплоть до момента срабатывания конечного выключателя. Лампочка, находящаяся на схеме, сигнализирует оператору о нахождении контроллера в нулевом положении либо об активации контактора РН.
Контроллер и контактор РН
А сейчас рассмотрим более подробно распространенные типы сетей.
Цепь оперативного действия
Контактор типа РН отвечает за включение и отключение оперативной цепи подъемного механизма. Цепочка представляет собой элемент, осуществляющий подачу напряжения на контакторные катушки. Как правило, компоненты работают с напряжением 220 вольт, но есть и модификации с катушками на 110В.
Конструкция схемы включает и детали, отвечающие за выполнение разных функций:
- передвижения;
- транспортировки телеги;
- поворота платформы.
Все эти устройства работают с релейными приспособлениями РН. Сеть включает два контакта последовательного типа на случай, если один из этих элементов приварится к неподвижному контакту из-за больших токов.
В ситуациях, когда оперативная цепь не имеет напряжения, нет необходимости ее включения. При осуществлении первичной подачи напряжения в ОЦ, машина не запускаются мгновенно, в каких бы положениях ни был контроллерный рычаг. Именно поэтому, крановщик для начала должен поставить рычаг в исходное положение, чтобы напряжение попало в цепь.
Цепь магнитов растормаживающего действия
Ротор мотора подъемника блокируется тормозными механизмами, когда данный компонент выключен. Для того, чтобы обеспечить вращения ротора, необходимо срабатывание растормаживающего электромагнита, который оперативно отожмёт колодки тормоза.
Компонент запускает электрический магнит контактора Т. Далее магнит последовательно подключается к сопротивлению РД-Г, которое дополнительно можно зашунтировать посредством контактора 1Т. Эта функция позволяет реле максимального тока бесперебойно контролировать величины токов, проходящих через катушки электрических магнитов.
Сделано это с целью обеспечения контроля величин тока посредством реле РТ. Реализуется это, чтобы через катушку электромагнита проходило напряжение определенного уровня, для избегания перегорания. Если же ток все-таки превысит значения установленной величины, тогда реле РТ отключает элемент 1Т, а сопротивление шунта размыкается. В результате этих реакций ток, проходящий через катушку магнитной детали, уменьшается.
Контакторы Т и 1Т на крановых установках реализованы в типе КПД. Предохранители 1П располагаются над аналогичным элементом 2П. В случае возникновения в цепях магнита замыкания и сгорания предохранителя 1П последует обесточивание оперативной цепи контакторов. Подъемный механизм останавливается и после этого происходит отключение реле 1 и 2 РУ, а также РН контактора.
Особенности тормозных систем
Старые гидравлические тормозные системы имеют тенденцию протекать и требуют технического обслуживания и экологические проблемы. Их можно заменить современными «тормозами по проводам».
Пакеты с педальным управлением тормоза подруливающего устройства переменного тока, которые решают эти проблемы. При этом, обеспечивается похожий эффект торможения, который присущ для работы с гидравлическими тормозами.
Доступны также и полностью закрытые тормоза современного дизайна, соответствующие эксплуатационным характеристиками. Габаритные характеристики тормозов оригинального оборудования – представленные часто по более низкой цене.
Модернизация мостового двухбалочного крана грузоподъёмностью 10 тонн
Alyona
22 июня 2020
- 0
1 222
Разработка технического предложения на модернизацию мостового двухбалочного крана грузоподъёмностью 10 тонн. В данной курсовой работе описывается устройство, принцип работы мостового электрического двухбалочного крана, а также были произведены патентные исследования.
Чертежи мостовых кранов / Краны
Принцип действия
Подъемные краны работают на два действия: подъем и спуск. Этим манипуляциям также отведены функции в электрических схемах привода.
Принцип работы на подъем
Схема подъема крана
Реализовано 4 подъемных режима, которые обладают общими и отличительными характеристиками. Запуск контакторов магнита растормаживающего действия Т и Т1 осуществляется при параллельном отжимании тормозных колодок. Включаются контакторы силового действия 1 и 2В, приводящие в движение электродвигатель. Далее запускается контактор П, отвечающий за ускорение. Данный компонент отвечает также за обеспечение минимального ускорения мотора (на первой ступени).
Поначалу происходит замыкание шайбы 7, запускающей 2В. С этой же шайбы напряжение поступает далее на 2 шайбу типа 1В, а потом только на 3 шайбу типа П. При реализации переходов на 2 – 4 режимы, наблюдается последовательное включение контакторов ускорения: 1 и 2У. только в четвертом режиме включаются версии 3 и 4У.
Принцип работы на спуск
Процесс на порядок проще, чем подъем, ведь при поднятии груза необходимо задействовать определенную энергию, а при спуске она тратится в малых объемах или же вовсе не расходуется. Объект опускается самостоятельно, при помощи всем известной силы тяжести. Единственное, на что может потребоваться энергия – это на обеспечение притормаживания груза во время спуска, во избежание сильного разгона.
Реализовано 4 ключевые режима для обеспечения надежного спуска, рассмотрим же их.
Первый режим
При реализации данной процедуры имеет место замыкание шайб контроллера 3, 2, 9 и 8. Третья шайба запускает контактор ускорения П, а вторая – силовой контактор 1В, работающий исключительно на подъем. Подача энергии на вышеуказанные шайбы осуществляется через девятую шайбу и контактные элементы РБ (в отдельных модификациях 1Т).
В ситуациях, когда 1Т отключено, до катушек РБ напряжение соответственно не поступает. Исходя из этого можно догадаться, что не запускаются и другие функциональные компоненты:
- электрический двигатель;
- тормозной механизм.
При нажатии оператором клавиши ВН2 запустятся компоненты Т и Т1, а следом за ними –приборы 2В, РБ, 1В и под самый конец – П. Как следствие – в статоре электромагнитное поле будет работать на подъем груза. Объяснение этому простое – режим 1 разработан для эффективного замедления опускающегося объекта. Это на порядок удобнее и выгоднее, чем применение привычных тормозных колодок, что существенно снижается износ компонентов. Это явление также известно, как остановка контртоком.
Режим второй
По сути, алгоритм решения аналогичен первому, за исключением работы контактора ускорения типа П. В результате интенсивность груза снижается.
Третий режим
При реализации этого механизма 1В и П не используются, вместо них активно применяются 2Н и 2В. В работу включается также 1Т, через РБ, контакт которого запускает Т-контактор. Дальше по цепочке включается контактор, отвечающий за ускорение 1У.
Осуществляя торможение по данному режиму сразу на 2 статорные обмотки, подается фаза с одними и теми же показателями. 3-я же фаза участия не принимает. Такой способ присоединения обмотки статора не позволит тормозить роторному элементу, куда бы не осуществлялись обороты. Он работает, обеспечивая спуск, тогда как статор параллельно реализует торможение.
Режим четвертый
Сначала происходит остановка контактора 2В, при последующем включении контактора силового типа 1Н. на электродвигатель поступает сразу три фазы, и силовой агрегат работает на понижение груза. 2, 3 и 4У контакторы также вступают в работу, обеспечивая ускорение. Как утверждают специалисты, данный режим прямо противоположный последнему «подъемному» режиму.
Все про устройство мостового крана: от грузовой тележки до электрооборудования
В 80-е годы в СССР ежегодно производилось 6-7 тысяч подъемных кранов мостового типа. В 2000-е годы их выпуск в России сократился до 1000-1500 единиц техники.
Несложное устройство мостового крана позволяет широко использовать грузоподъемные машины (ГПМ) этого типа на разномасштабных предприятиях — от маленьких автомастерских до больших металлургических комбинатов или ТЭЦ.
Два способа опирания на крановый путь
У двутавровой пролетной балки есть верхний и нижний горизонтальные пояса. На верхний размещают опорные, а под нижний крепятся подвесные:
- Опорные— устанавливаются колесами на рельсы сверху. Грузоподъемность опорных ГПМ — максимальна (до 500т), но постройка подкрановой эстакады или опор требует финансовых затрат.
- Подвесные— подцепляются к нижним полкам кранового пути. Этот вид опирания прост в монтаже и имеет невысокую стоимость. Небольшая грузоподъемность (до 8т) окупается малой высотой конструкции, из-за чего размер рабочей зоны больше, чем у опорных кранов.Подвесные краны можно установить на часть цеха. Есть возможность стыковать краны (стыковой замок) и перемещать тележки с одного крана на другой.
Конструкции устройства бывают разными. Они могут двигаться поступательно или совершать обороты вокруг вертикальной оси (хордовые, радиальные и поворотные) ГПМ.
Конструкция мостового крана
По количеству главных балок конструкция ГПМ бывает:
- однобалочная. Используется на небольших производствах, может быть подвесным или опорным. Г/п 8 т.Использование — в больших производственных цехах, в автомобильной, металлургической промышленности. Длина пролета — до 60м. Грузовая тележка может иметь вспомогательный грузоподъемный механизм помимо основного.
Тип привода мостового ГПМ
Привод механизмов у мостовых ГПМ может быть ручным или электрическим.
- Ручнойпривод. У этого мостового крана механизмом передвижения служат червячные тали.Используют ручные ГПМ для подъема относительно небольших грузов, при производстве вспомогательных или ремонтных работ.
- Электропривод. Электрические тельферы служат в качестве устройств подъема и перемещения грузов. Мост ГПМ движется тоже с помощью электродвигателей, они передают вращение ходовым колесам либо через редукторы, либо через редуктор и трансмиссию.
Из чего состоит мостовой кран?
Общее устройство мостового крана — это одно- или двухбалочный мост и грузовая тележка, которая по нему перемещается.
https://www.youtube.com/watch?v=9svnGhKK7Vk
На мосту и на тележке размещается электрооборудование и основные узлы и механизмы.
Тормозная система
Стандартная система торможения для мостовых ГПМ — колодочная или диско-колодочная.
Если скорость тележки ≤32 м/мин, механизмы передвижения можно не оборудовать тормозами. В этих условиях ГПМ сможет затормозить самостоятельно, не превысив длину тормозного пути.
Функционально тормозные устройства кранов бывают стопорными — для остановки устройства — и спускными — замедляющими спуск.
Тормоза могут быть открытого или закрытого типов. Подъемные механизмы кранов оснащаются закрытыми тормозами — в нормальном положении механизмы заторможены, тормоз снимается только при запуске двигателя.
Механизмы подъема кранов, перемещающих опасные грузы: расплавленный металл, взрывчатые, ядовитые вещества, кислоты, имеют 2 тормоза, действующие автономно.
Тормоза закрытого типа используют в ГПМ потому, что они более долговечны, чем открытые и их поломку можно легко заметить.
Открытые тормоза в некоторых случаях монтируют дополнительно к закрытым (как вспомогательные) — для увеличения скорости и точности размещения грузов.
Подъемные механизмы
Механизм подъема и спуска груза тоже размещен на крановой тележке.
Состоит из приводного электродвигателя, трансмиссионных валов, горизонтального редуктора и грузовых тросов с барабаном для намотки.
Для работ с грузами >80 т применяется доп. редуктор мостового крана или понижающая зубчатая передача. Чтобы повысить тяговое усилие используют полиспаст (чаще всего сдвоенный кратный).
Редуктор мостового крана, его назначение и устройство
Функционально цилиндрические крановые редукторы можно разделить на:
- редукторы подъемных механизмов;
- редукторы движения тележек;
- редукторы движения мостов.
Редуктор может иметь 2 типа исполнения: развернутое и планетарное.
Редукторы развернутого типа, оснащенные цилиндрическими колесами более популярны. Ремонт и обслуживание механизмов этой конструкции проще и дешевле.
Подкрановые пути мостовых кранов
При устройстве кранового пути в качестве крановых и тележечных рельсов используют ж/д рельсы Р18, Р24, Р38 (узкоколейные) и Р43, Р50 и Р65 (для широкой колеи).
Также используют спец.крановые рельсы КР50, КР70, КР80, КРЮО, КР120, или же стальные направляющие квадратного сечения с закругленными краями (для механизмов г/п ≥ 20т).
В качестве крановых путей для подвесного типа ГПМ применяют двутавровые балки.
Креплениярельсовкбалкам должны исключатьсмещениерельсов и должны позволять быструю замену изношенных рельсов. Их концы соединяют двусторонними накладками и болтами или сваривают.
Электрообрудование
К электрике мостовых ГПМ предъявляются особые, повышенные требования, что обусловлено напряженными режимами работы.
За 1 час может быть произведено сотни включений, выключений и перегрузок, связанных с разгоном, торможением устройства в целом или тележки.
Инновации в системах торможения
В современных схемах торможения применяются модернизированные тормоза, эффективность которых существенно улучшилась, тормозные накладки получили больший ресурс. Компоненты работают вместе с регуляторами частот переменного тока или же цифровыми контроллерами постоянного тока.
Во многих случаях опорные подшипники в поворотных рычагах заменены самосмазывающимися. А композитные подшипники, устойчивые к ударам, не подверженные воздействию грязи или других загрязнений, и может работать в агрессивных средах.
Функционал релейных устройств
Ключевыми реле в конструкции схемы привода подъемного механизма являются две модели: 1 и 2 РУ. Используются они в связке с другим базовым компонентом РБ, но функционал при этом разный. Один из примеров, когда при работе на 4 режиме подъема запускаются ускорительные контакторы: 3У и 4У. Если же осуществляется спуск на 4 режиме, тогда в работу вступают целых три контактора, прибавляется версия 2У.
Это обусловливается конструкцией контроллера, которая обладает 4 рабочими режимами для каждой стороны. С целью избегания внезапных ускорений, включение старт контактора необходимо разъединить во времени. Этим и занимаются реле 1У и 2У.
Как можно видеть, принципиально реализованная схема дает возможность устанавливать кран и упрощать процессы сервисного обслуживания. Полное соблюдение параметров производителя позволит существенно снизить негативные влияния на механизмы подъемного крана. Конструкция приборов, применяющихся в схемах, регулярно модернизируется.